| Home | Contents | Start | Prev | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | Next |
Voltage Regulation
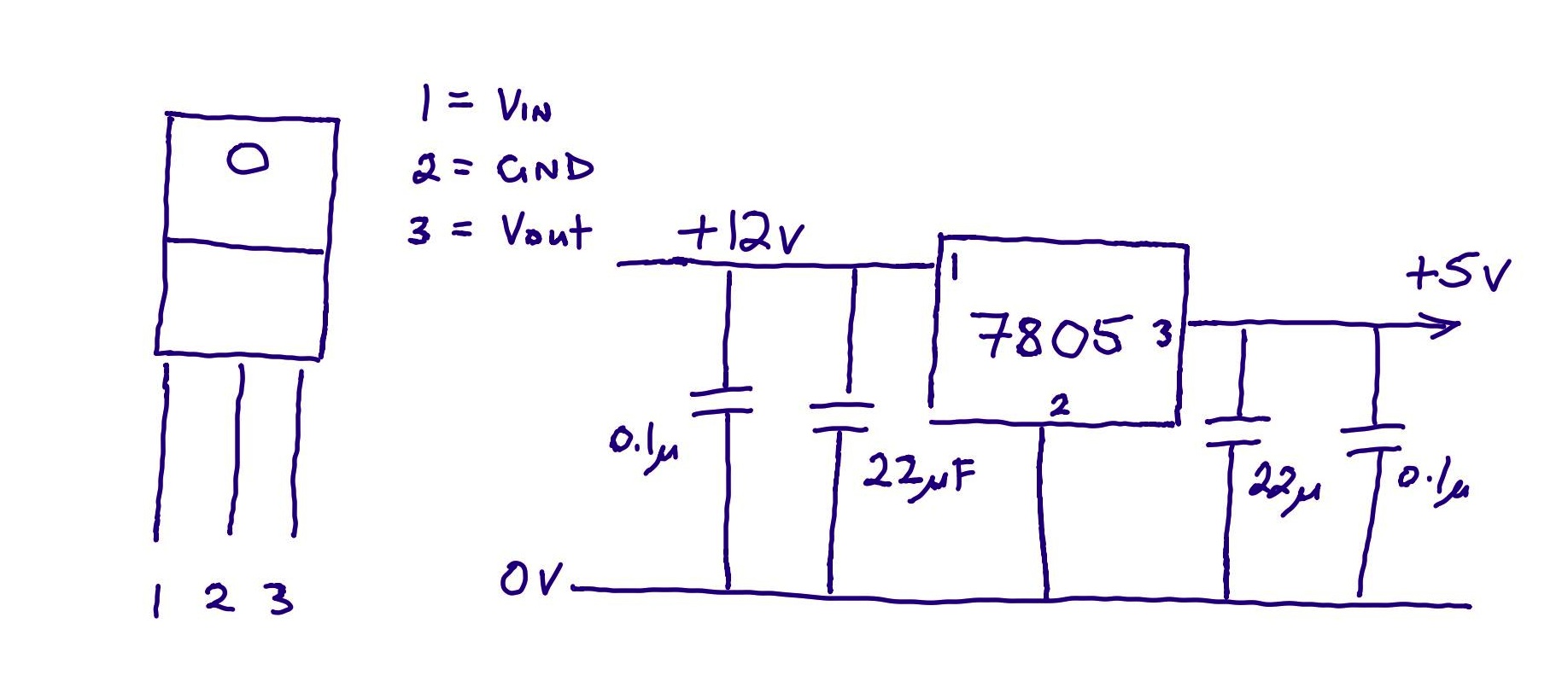
The locomotion and cutting motors will be driven from 12 volts. The arduino and RF Receiver are designed to run off 5 volts. Rather than use the arduino voltage regulator, I decided to make a separate board that had a greater current drive. This uses a 7805 device, the 5V being used to drive the electronics while 12V for the electrics. This is very simple circuit.
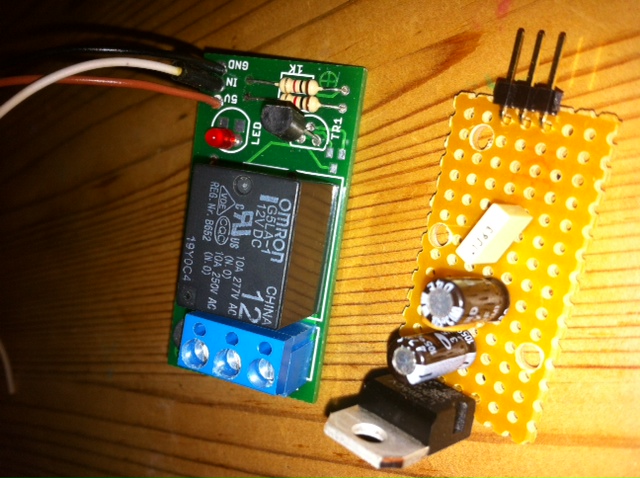
And here it is on a veroboard. This will go either in its own screened box alongside the cutting motor relay (in background). The connections to the regulator will be soldered directly onto the board, the plug at the edge is just for testing/
Cutting Motor Switching
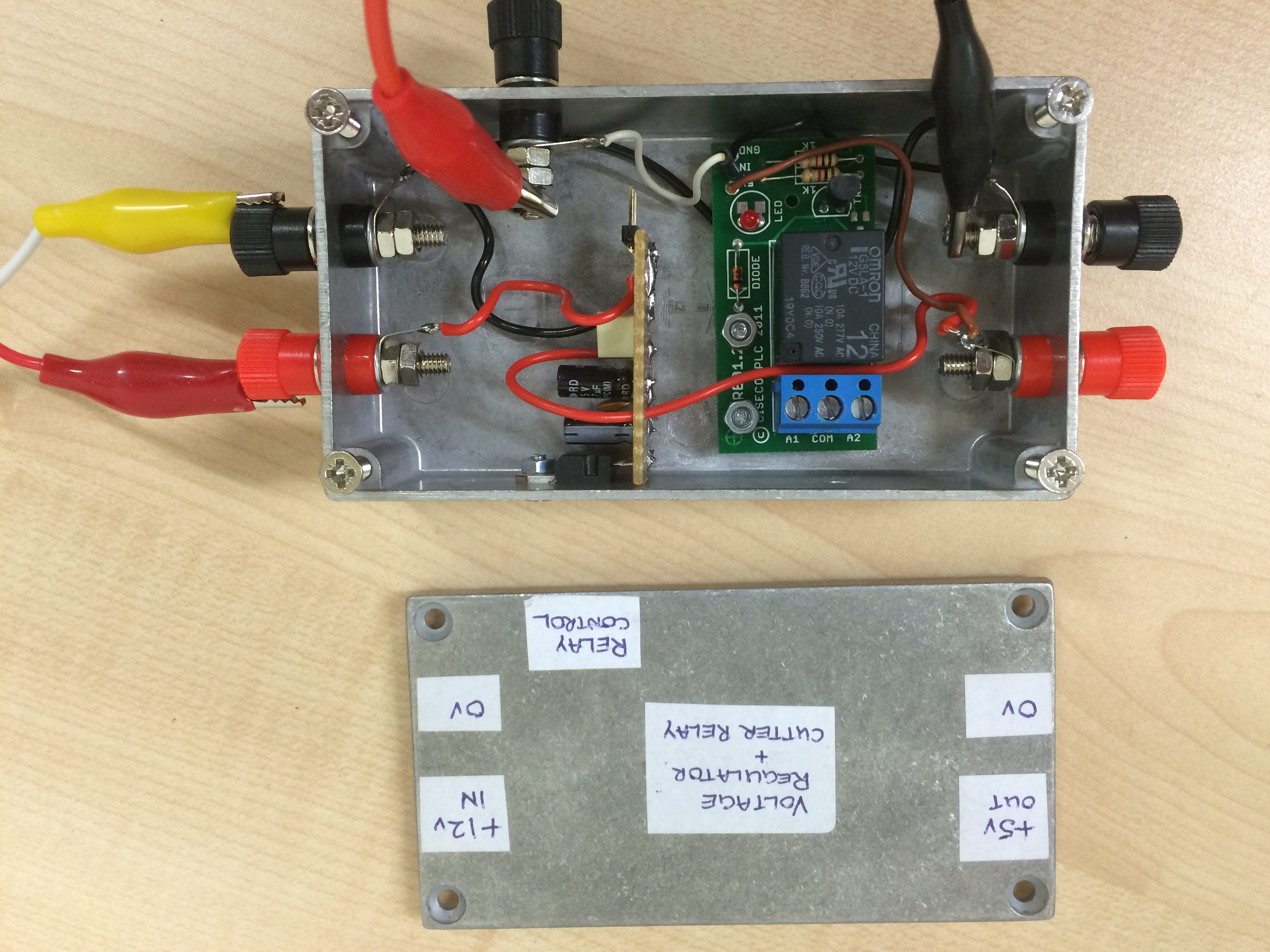
The cutting motors are all connected in parallel and switched on and off via a relay board that is triggered by the arduino. This is the relay board salvaged from Lawna.
Another screened enclosure was used to mount the regulator and blade relay. The enclosure also serves as a heatsink for the 7805 regulator. Here is the layout before wiring up all the connections.
Arduino and Motor Driver Mounting
The arduino and Motor Driver Shield are mounted in a screened enclosure with external connections for power. Inputs and outputs are via ho;es in the enclosure. I decided to try a CAT5 network cable to pass all the inputs into the arduino. This was a relevation. I always thought CAT5 cables were screened but they just seem to be a collection of 6 twisted pairs! If pickup problems exist, I'll use a screened cable instead. The USB socket is exposed through the enclosure to ease reprogramming of the arduino as there will be lots of test programs required before going for the full-blown application.
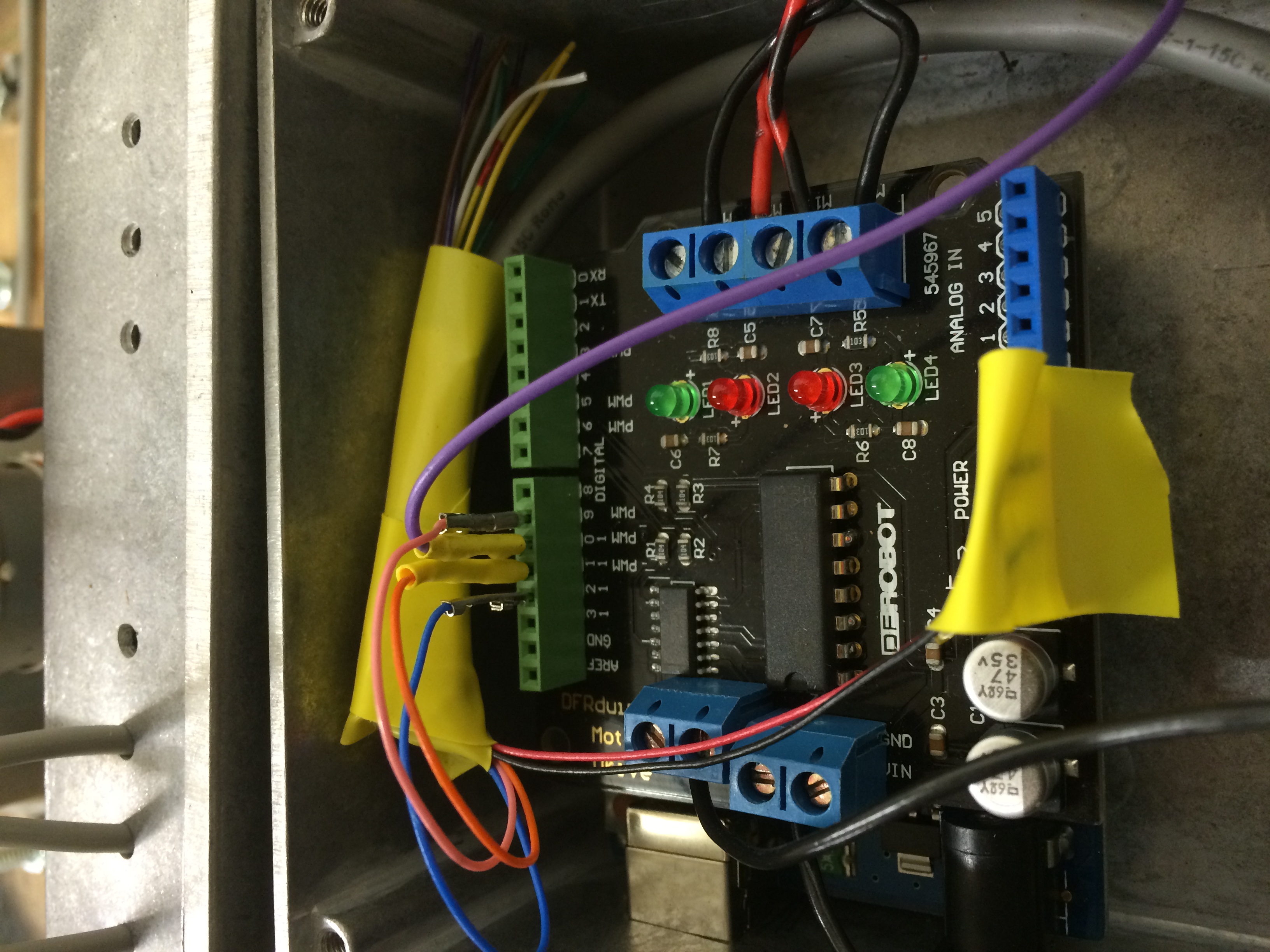
One of the issues I had with Lawna was the plug-and-socket arrangement on the arduino. Even when I made up custom header plugs, they were prone to work lose or make poor connections after a while. For Mo, I use a custom shield and solder directly to the board. Before fitting the shield, I can use the usual plug/sockets to test each part of the application in isolation and then slowly integrate them.
August 2014| Home | Contents | Start | Prev | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | Next |